




C/L/U Type Dual Axis Servo Positioner
ຕົວກໍານົດການດ້ານວິຊາການ
| C-type double-axis positioner servo | L-type double-axis positioner servo | U-type double-axis positioner servo | |||||||||||
| ເລກລໍາດັບ | ໂຄງການ | ພາລາມິເຕີ | ພາລາມິເຕີ | ພາລາມິເຕີ | ຂໍ້ສັງເກດ | ພາລາມິເຕີ | ພາລາມິເຕີ | ພາລາມິເຕີ | ຂໍ້ສັງເກດ | ພາລາມິເຕີ | ພາລາມິເຕີ | ພາລາມິເຕີ | ຂໍ້ສັງເກດ |
| 1 | ການໂຫຼດໃຫ້ຄະແນນ | 200 ກິໂລ |
500kg | 1000kg | ພາຍໃນລັດສະໝີ R400mm/R400mm/R600mm ຂອງແກນທີສອງ | 500kg | 1000kg | 2000ກກ | ພາຍໃນລັດສະໝີ R400mm/R600mm/R800mm ຂອງແກນທີສອງ | 1000kg | 3000KG | 5000KG | ພາຍໃນລັດສະໝີ R600mm/R1500mm/R2000mm ຂອງແກນທີສອງ |
| 2 | ລັດສະໝີມາດຕະຖານຂອງ gyration | R400mm | R400mm | R600mm |
| R400mm | R600mm | R800mm |
| R600mm | R1500mm | R2000mm |
|
| 3 | ແກນ flip ແກນທໍາອິດ | ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
|
| 4 | ມຸມຫມຸນແກນທີສອງ | ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
|
| 5 | ປະເມີນຄວາມໄວຂຶ້ນຂອງແກນທຳອິດ | 50°/ວິ | 50°/ວິ | 15°/ສ |
| 50°/ວິ | 50°/ວິ | 17°/ສ |
| 17°/ສ | 17°/ສ | 17°/ສ |
|
| 6 | ຈັດອັນດັບຄວາມໄວການຫມຸນຂອງແກນທີສອງ | 70°/ວິ | 70°/ວິ | 70°/ວິ |
| 70°/ວິ | 70°/ວິ | 17°/ສ |
| 24°/ສ | 17°/ສ | 24°/ສ |
|
| 7 | ເຮັດຊ້ຳຄວາມຖືກຕ້ອງຂອງການຈັດຕຳແໜ່ງ | ±0.10ມມ | ±0.15ມມ | ±0.20ມມ |
| ±0.10ມມ | ±0.10ມມ | 17°/ສ |
| ±0.15ມມ | ±0.20ມມ | ±0.25ມມ |
|
| 8 | ຂະໜາດຂອບເຂດຂອງກອບການຍ້າຍ (ຄວາມຍາວ×ກວ້າງ×ສູງ) | 1200mm×600mm×70mm | 1600mm×800mm×90mm | 2000mm×1200mm×90mm |
| - | - | - |
| - | - | - |
|
| 9 | ມິຕິໂດຍລວມຂອງຕົວປ່ຽນຕຳແໜ່ງ (ຄວາມຍາວ×ກວ້າງ×ສູງ) | 2000mm×1100mm×1700mm | 2300mm×1200mm×1900mm | 2700mm×1500mm×2200mm |
| 1500mm×500mm×850mm | 2000mm×750mm×1200mm | 2400mm×900mm×1600mm |
| 4200mm×700mm×1800mm | 5500mm×900mm×2200mm | 6500mm × 1200mm × 2600mm |
|
| 10 | ແຜ່ນ rotary ສອງແກນມາດຕະຖານ | - | - | - | - | Φ800ມມ | Φ1200ມມ | Φ1500ມມ |
| Φ1500ມມ | Φ1800ມມ | Φ2000ມມ |
|
| 11 | ຄວາມສູງສູນກາງຂອງການຫມຸນແກນທໍາອິດ
| 1200 ມມ | 1350mm | 1600 ມມ |
| 550 ມມ | 800 ມມ | 1000 ມມ |
| 1500 ມມ | 1750mm | 2200 ມມ |
|
| 12 | ເງື່ອນໄຂການສະຫນອງພະລັງງານ | ສາມເຟດ 200V ± 10% 50HZ | ສາມເຟດ 200V ± 10% 50HZ | ສາມເຟດ 200V ± 10% 50HZ | ດ້ວຍການແຍກຕົວປ່ຽນ | ສາມເຟດ 200V ± 10% 50HZ | ສາມເຟດ 200V ± 10% 50HZ | ສາມເຟດ 200V ± 10% 50HZ | ດ້ວຍການແຍກຕົວປ່ຽນ | ສາມເຟດ 200V ± 10% 50HZ | ສາມເຟດ 200V ± 10% 50HZ | ສາມເຟດ 200V ± 10% 50HZ | ດ້ວຍການແຍກຕົວປ່ຽນ |
| 13 | ຊັ້ນ insulation | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | ນ້ໍາຫນັກສຸດທິຂອງອຸປະກອນ | ປະມານ 800kg | ປະມານ 1300kg | ປະມານ 2000kg |
| ປະມານ 900kg | ປະມານ 1600kg | ປະມານ 2500kg |
| ປະມານ 2200kg | ປະມານ 4000kg | ປະມານ 6000kg | |
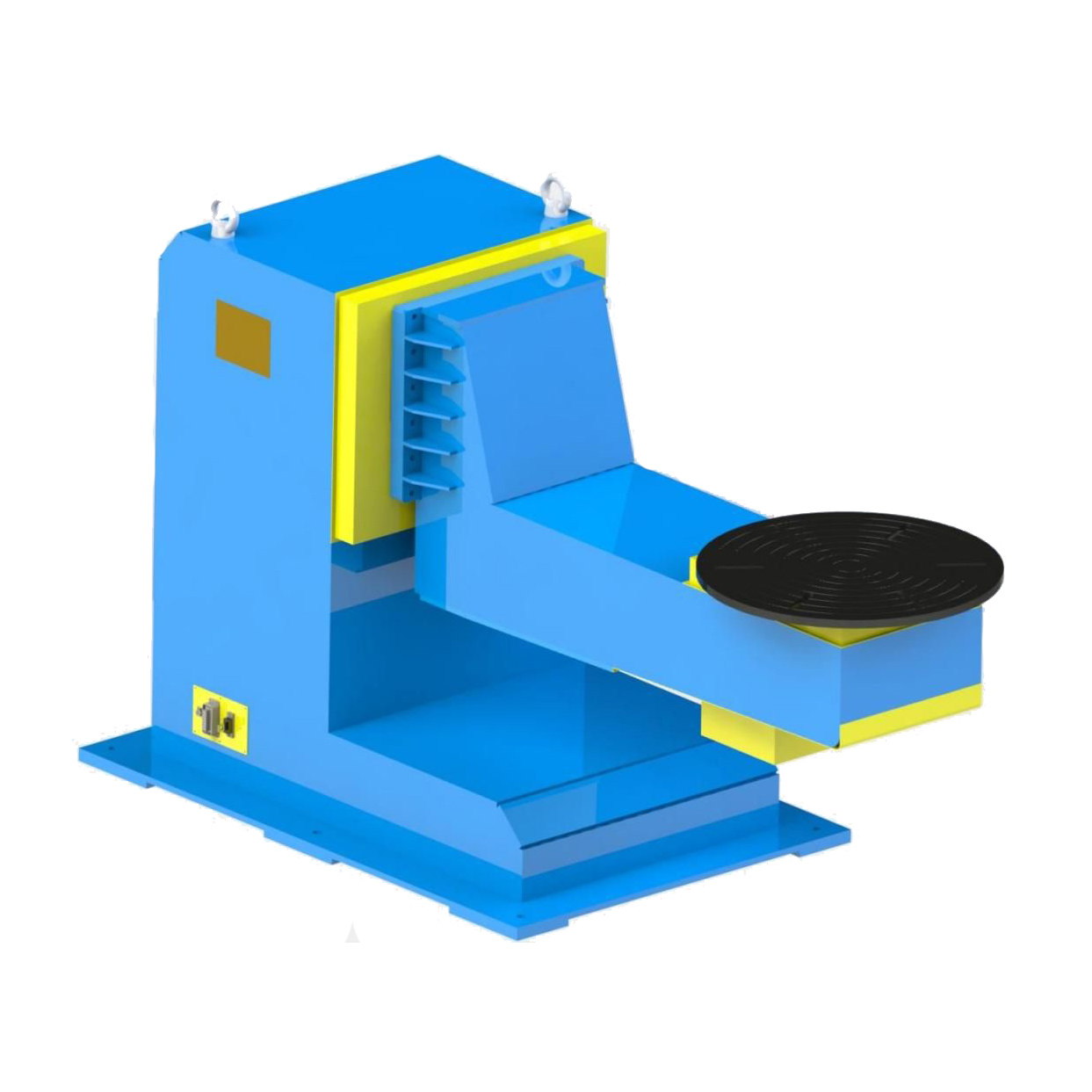
C-type double-axis positioner servo
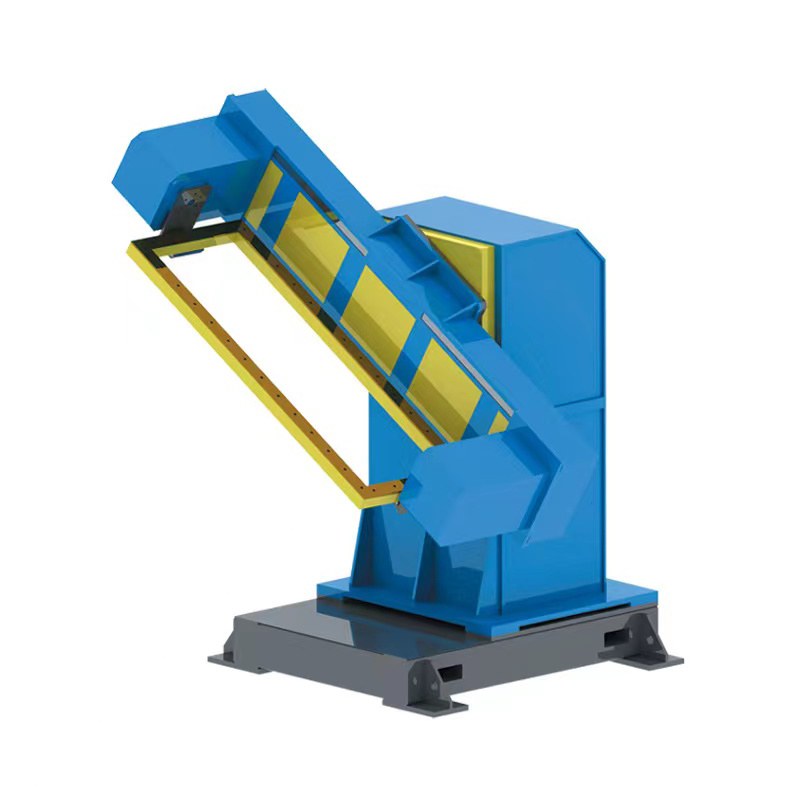
L-type double-axis positioner servo

U-type double-axis positioner servo
ແນະນຳໂຄງສ້າງ
ການວາງຕໍາແຫນ່ງ servo ແກນຄູ່ແມ່ນສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍກອບການເຊື່ອມໂລຫະ, ກອບການໂຍກຍ້າຍການເຊື່ອມ, AC servo motor ແລະ RV ຫຼຸດຜ່ອນຄວາມແມ່ນຍໍາ, ສະຫນັບສະຫນູນ rotary, ກົນໄກ conductive, ໄສ້ປ້ອງກັນແລະລະບົບການຄວບຄຸມໄຟຟ້າ. ກອບປະສົມປະສານຂອງ welded ແມ່ນ welded ກັບໂປຣໄຟລ໌ຄຸນນະພາບສູງ. ຫຼັງຈາກ annealing ແລະການບັນເທົາຄວາມກົດດັນ, ມັນຈະຖືກປຸງແຕ່ງໂດຍເຄື່ອງຈັກມືອາຊີບເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງຂອງເຄື່ອງຈັກສູງແລະຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງທີ່ສໍາຄັນ. ພື້ນຜິວຖືກສີດດ້ວຍສີທີ່ມີລັກສະນະຕ້ານການ rust, ທີ່ສວຍງາມແລະໃຈກວ້າງ, ແລະສີສາມາດປັບແຕ່ງໄດ້ຕາມຄວາມຕ້ອງການຂອງລູກຄ້າ.
ກອບການໂຍກຍ້າຍການເຊື່ອມໂລຫະຕ້ອງໄດ້ຮັບການເຊື່ອມແລະ molded ດ້ວຍເຫຼັກ profiled ຄຸນນະພາບສູງແລະປຸງແຕ່ງໂດຍເຄື່ອງຈັກມືອາຊີບ. ພື້ນຜິວຈະຖືກເຄື່ອງຈັກດ້ວຍຮູ screw ມາດຕະຖານສໍາລັບເຄື່ອງມືຕັ້ງຕໍາແຫນ່ງ, ແລະການທາສີແລະການເຮັດໃຫ້ສີດໍາແລະການປິ່ນປົວປ້ອງກັນ rust ຈະຖືກປະຕິບັດ.
ເວທີ rotary ເລືອກເຫຼັກ profile ຄຸນນະພາບສູງຫຼັງຈາກການປະມວນຜົນກົນຈັກເປັນມືອາຊີບ, ແລະຫນ້າດິນແມ່ນ machined ມີຮູ screw ມາດຕະຖານສໍາລັບ mounting ເຄື່ອງມືການຈັດຕໍາແຫນ່ງ, ແລະການປິ່ນປົວ blackening ແລະ rust ຈະໄດ້ຮັບການປະຕິບັດ.
ການເລືອກ AC servo motor ແລະ RV reducer ເປັນກົນໄກພະລັງງານສາມາດຮັບປະກັນຄວາມຫມັ້ນຄົງຂອງການຫມຸນ, ຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງ, ຄວາມທົນທານຍາວແລະອັດຕາການລົ້ມເຫຼວຕ່ໍາ. ກົນໄກການ conductive ແມ່ນເຮັດດ້ວຍທອງເຫຼືອງ, ເຊິ່ງມີຜົນກະທົບ conductive ດີ. ພື້ນຖານ conductive adopts integral insulation, ເຊິ່ງປະສິດທິພາບສາມາດປ້ອງກັນ servo motor, ຫຸ່ນຍົນແລະແຫຼ່ງພະລັງງານການເຊື່ອມ.
ລະບົບການຄວບຄຸມໄຟຟ້າຮັບຮອງເອົາຍີ່ປຸ່ນ Omron PLC ຄວບຄຸມຕໍາແຫນ່ງ, ມີການປະຕິບັດທີ່ຫມັ້ນຄົງແລະອັດຕາການລົ້ມເຫຼວຕ່ໍາ. ອົງປະກອບໄຟຟ້າໄດ້ຖືກຄັດເລືອກຈາກຍີ່ຫໍ້ທີ່ມີຊື່ສຽງທັງໃນແລະຕ່າງປະເທດເພື່ອຮັບປະກັນຄຸນນະພາບແລະຄວາມຫມັ້ນຄົງຂອງການນໍາໃຊ້.











