



ຫຸ່ນຍົນສະແຕມ/ການວາງຊ້ອນກັນ SDCX RMD-300/200/160/120/35/08/110/20/50
ຕົວກໍານົດການດ້ານວິຊາການ
| ຮຸ່ນ | ລະດັບເສລີພາບ | ໂໝດຂັບລົດ | ໂຫຼດໄດ້ (KG) | ຄວາມຖືກຕ້ອງຂອງການຈັດຕຳແໜ່ງຊ້ຳໆ (ມມ) | ໄລຍະການເຄື່ອນໄຫວ (°) | ຄວາມໄວສູງສຸດ (°/s) | ການໂຫຼດ inertia ຂອງຂໍ້ມືທີ່ອະນຸຍາດ (kg·m2) | ການຕີເປັນວົງກົມ (ຮອບວຽນ/ຊົ່ວໂມງ) | ລັດສະໝີການເຄື່ອນໄຫວ (ມມ) | ນ້ຳໜັກທ້ອງຖິ່ນ (ກິໂລ) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 | 4 | AC servo drive | 300 | ±0.5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | 100 | 190 | ໑໓໔ | 1000③ | 3150 | 1500 |
| SDCX-RMD200 | 4 | AC servo drive | 200 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 105 | 107 | ໑໑໔ | 242 | 78 | 1300③ | 3150 | 1500 |
| SDCX-RMD160 | 4 | AC servo drive | ໑໖໐ | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | ໑໒໓ | ໑໒໓ | 128 | 300 | 78 | 1500③ | 3150 | 1500 |
| SDCX-RMD120 | 4 | AC servo drive | 120 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 128 | ໑໒໖ | 135 | 300 | 78 | 1560③ | 3150 | 1500 |
| SDCX-RMD50 | 4 | AC servo drive | 50 | ±0.2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | ໑໗໑ | ໑໗໑ | ໑໗໑ | 222 | 4.5 | 1700② | 2040 | 660 |
| SDCX-RMD20 | 4 | AC servo drive | 20 | ±0.08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | ໑໗໐ | ໑໗໐ | 185 | 330 | 0.51 | 1780① | 1720 | 256 |
| SDCX-RMD08 | 4 | AC servo drive | 8 | ±0.08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | 251 | 195 | 195 | 367.5 | 0.25 | 1800① | 1433 | 180 |
ຂໍ້ສັງເກດ:
①ຕິດຕາມການທົດສອບແມ່ນສູງ 150mm ແລະກວ້າງ 1000mm, ແລະເວລາວົງຈອນຕົວຈິງໄດ້ຮັບຜົນກະທົບຈາກສະພາບການເຮັດວຽກຕົວຈິງ;
②ຕິດຕາມການທົດສອບແມ່ນສູງ 200mm ແລະກວ້າງ 1000mm, ແລະເວລາວົງຈອນຕົວຈິງໄດ້ຮັບຜົນກະທົບຈາກສະພາບການເຮັດວຽກຕົວຈິງ;
③ຕິດຕາມການທົດສອບແມ່ນສູງ 400mm ແລະກວ້າງ 2000mm, ແລະເວລາວົງຈອນຕົວຈິງໄດ້ຮັບຜົນກະທົບຈາກສະພາບການເຮັດວຽກຕົວຈິງ;
ຫຼີກລ້ຽງການສໍາພັດກັບທາດອາຍຜິດໄຟໄຫມ້, ລະເບີດແລະ corrosive ແລະຂອງແຫຼວ; ຈົ່ງເຮັດເພື່ອບໍ່ໃຫ້ຖືກນ້ຳ, ນ້ຳມັນ ແລະຝຸ່ນຟອກ; ຮັກສາໃຫ້ຫ່າງຈາກແຫຼ່ງສຽງໄຟຟ້າ (plasma)
ໄລຍະການເຄື່ອນໄຫວ
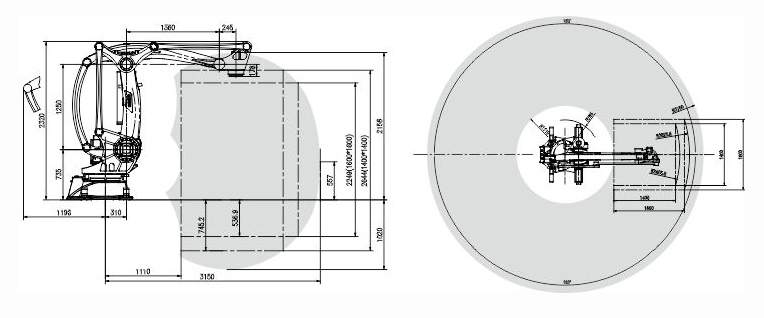
Plot of Motion Range ສໍາລັບ SDCX-RMD300/200/160/120
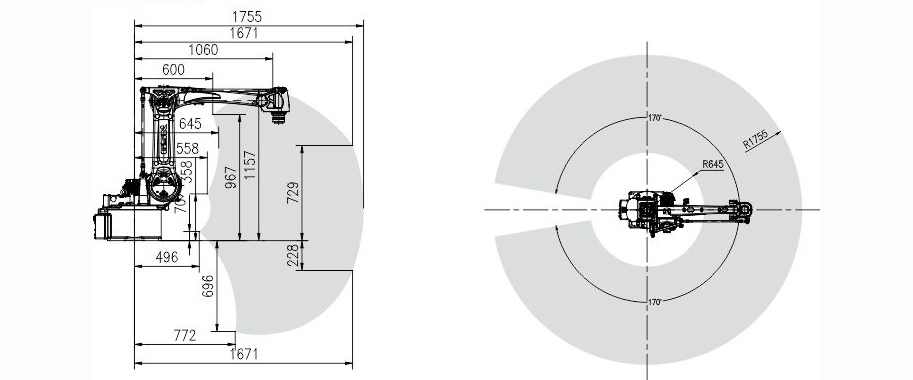
Plot of Motion Range ສໍາລັບ SDCX-RMD20
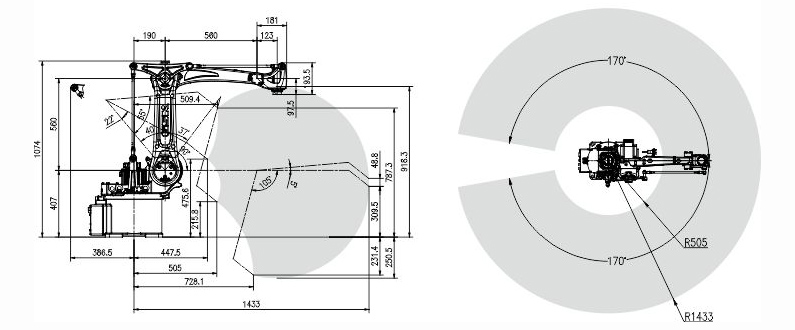
Plot of Motion Range ສໍາລັບ SDCX-RMD08
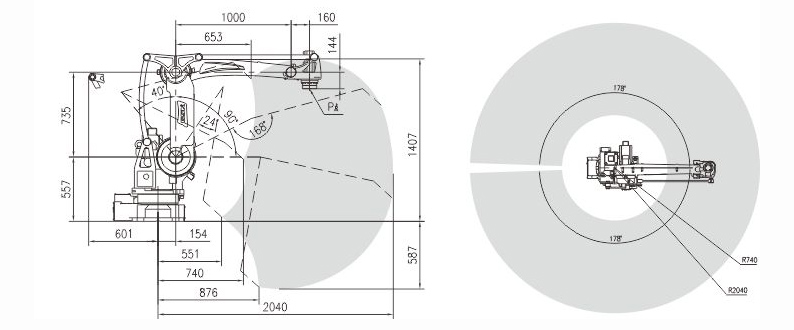
Plot of Motion Range ສໍາລັບ SDCX-RMD50
ການສະແດງຄໍາຮ້ອງສະຫມັກຜະລິດຕະພັນ
ວິທີແກ້ໄຂ
ໂຄງການດ້ານວິຊາການຂອງໂຄງການຈັດການເຫຼັກກ້າ












